一、賽事簡(jiǎn)介
全國(guó)大學(xué)生智能精密裝配大賽(以下簡(jiǎn)稱(chēng)“裝配大賽”)由中國(guó)機(jī)械工程學(xué)會(huì)主辦,是中國(guó)大學(xué)生機(jī)械工程創(chuàng)新創(chuàng)意大賽8項(xiàng)專(zhuān)業(yè)賽事之一,旨在搭建智能裝配技術(shù)交流平臺(tái),推動(dòng)智能裝配先進(jìn)理念及技術(shù)應(yīng)用,培養(yǎng)智能裝配人才創(chuàng)新及實(shí)踐能力,激發(fā)廣大機(jī)械工程及其相關(guān)交叉領(lǐng)域大學(xué)生興趣和潛能,助推智能精密裝配技術(shù)的不斷發(fā)展和進(jìn)步,實(shí)現(xiàn)我國(guó)從制造大國(guó)向制造強(qiáng)國(guó)的飛躍。
二、競(jìng)賽內(nèi)容
2023年中國(guó)大學(xué)生機(jī)械工程創(chuàng)新創(chuàng)意大賽智能精密裝配大賽,本賽事針對(duì)學(xué)科和專(zhuān)業(yè)領(lǐng)域特點(diǎn),設(shè)置裝配過(guò)程精確數(shù)字孿生建模、圖像識(shí)別與精確對(duì)準(zhǔn)技術(shù)、精密柔性抓取技術(shù)和精密螺紋連接技術(shù)等智能裝配關(guān)鍵技術(shù)相關(guān)賽項(xiàng),并且以解決軍民用裝配關(guān)聯(lián)短板技術(shù)為出發(fā)點(diǎn),綜合考察裝配技術(shù)研究領(lǐng)域大學(xué)生的創(chuàng)新思維能力、創(chuàng)新設(shè)計(jì)力和創(chuàng)新實(shí)踐能力。
選題背景:隨著人工智能的發(fā)展,在機(jī)械領(lǐng)域充斥了大量的智能化設(shè)備,在各類(lèi)智能精密工程實(shí)踐中,對(duì)于如何提高精確性,提高智能性,仍然存在著一些難以攻克的問(wèn)題,極大地影響工程進(jìn)度和質(zhì)量。亟需有針對(duì)性地設(shè)計(jì)在各種特殊工況下使用的各類(lèi)特種機(jī)械,或機(jī)器人,作為特種輔助工具又快又好又精確地完成預(yù)定工作任務(wù)。
內(nèi)容說(shuō)明:通過(guò)調(diào)研,針對(duì)某類(lèi)工程的特點(diǎn)自行提出設(shè)計(jì)需求,明確設(shè)計(jì)功能目標(biāo),完成一種特殊工況下使用的特種機(jī)械或機(jī)器人設(shè)計(jì)。
本科賽項(xiàng)設(shè)手動(dòng)組和自動(dòng)組二個(gè)類(lèi)別。兩組設(shè)計(jì)方案應(yīng)滿(mǎn)足以下要求a-d 項(xiàng)
內(nèi) 容 | 要 求 |
a專(zhuān)用屬性 | 面向某種工程實(shí)際存在的機(jī)械裝置與作業(yè)對(duì)象的對(duì)接不暢問(wèn)題,設(shè)計(jì)針對(duì)其中完成某特定任務(wù)的機(jī)械或機(jī)器人。 |
b功能實(shí)現(xiàn) | (1)完成某特定任務(wù)的機(jī)械或機(jī)器人能夠進(jìn)入工作環(huán)境、接近工作對(duì)象、完成工作任務(wù)。 (2)“準(zhǔn)確、可靠、無(wú)損害”原則——要求定位準(zhǔn)確,完成預(yù)定任務(wù)可靠,且不對(duì)工作對(duì)象造成損害。 (3)功能齊全、動(dòng)作準(zhǔn)確、可靠,具有較高的工作效率。 |
c機(jī)器類(lèi)型 | (1)限于小型設(shè)備。 (2)可以是整體式設(shè)備,具有行走、機(jī)架固定、各軸移動(dòng)(旋轉(zhuǎn))、各類(lèi)任務(wù)功能。設(shè)備在工作場(chǎng)景內(nèi)穿行時(shí),須滿(mǎn)足安全條件(含:人員安全、不損壞工作對(duì)象等)。 (3)可以是整臺(tái)設(shè)備中的主體部件(機(jī)械或機(jī)器人)。 |
d創(chuàng)新要素 | (1)與同類(lèi)原理機(jī)械的比較,在運(yùn)動(dòng)原理、機(jī)構(gòu)設(shè)計(jì)方面有創(chuàng)新; (2)與同類(lèi)原理機(jī)械的比較,在材料選取、結(jié)構(gòu)設(shè)計(jì)方面有創(chuàng)新。 |
零件自動(dòng)識(shí)別與安裝任務(wù)書(shū)
考察內(nèi)容:裝配基礎(chǔ)知識(shí)、機(jī)器人操作基礎(chǔ)知識(shí)、單目視覺(jué)、機(jī)械臂位姿控制、人機(jī)協(xié)作、機(jī)械臂抓取
三、任務(wù)概述
參賽者需要設(shè)計(jì)算法,編制程序,控制機(jī)器人自動(dòng)完成零件識(shí)別與安裝。機(jī)器人需要利用單目相機(jī),識(shí)別出安裝區(qū)給定標(biāo)志物的形狀,并在零件區(qū)自動(dòng)識(shí)別相應(yīng)零件,識(shí)別出零件位置后抓取零件,將其安裝到安裝區(qū)指定位置。機(jī)器人與安裝區(qū)、零件區(qū)的相對(duì)位置如圖所示:
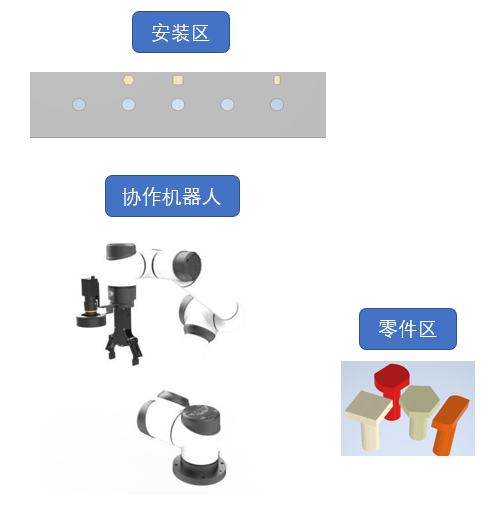
圖1 比賽設(shè)備相對(duì)位置示意圖
四、任務(wù)細(xì)則
比賽的實(shí)際運(yùn)行場(chǎng)地在隔振光學(xué)平臺(tái)上,協(xié)作機(jī)器人(掛載單目相機(jī)與機(jī)械夾爪)與設(shè)計(jì)的標(biāo)準(zhǔn)多孔板安裝在光學(xué)平臺(tái)上(其中:機(jī)器人的位置標(biāo)定、相機(jī)標(biāo)定參數(shù)以及多孔板的安裝位置會(huì)在賽前給出),標(biāo)準(zhǔn)多孔板設(shè)計(jì)有五個(gè)孔,孔的上方可隨機(jī)放置不同形狀的標(biāo)志物,如圖2所示。
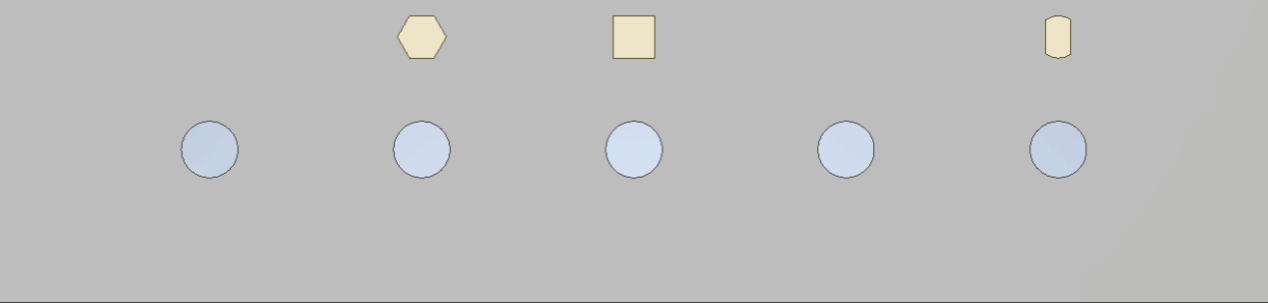
圖2 多孔板與標(biāo)志物
四種形狀的零件隨機(jī)放置在零件區(qū)且存在不同程度的傾斜。參賽者需要編制程序,使得機(jī)器人能夠識(shí)別出安裝區(qū)標(biāo)志物的形狀,并在零件區(qū)(圖3)找出對(duì)應(yīng)形狀的零件,依次抓取并安裝至安裝區(qū)標(biāo)志物對(duì)應(yīng)的孔中,由準(zhǔn)確識(shí)別與安裝零件數(shù)量、安裝完成時(shí)間來(lái)進(jìn)行參賽者的打分。

圖3 零件區(qū)
五、初賽比賽流程
5.1賽前準(zhǔn)備
(1)參賽各隊(duì)參加機(jī)器人的使用培訓(xùn),掌握機(jī)器人的操作方法,掌握單目視覺(jué)相機(jī)相關(guān)知識(shí),及機(jī)器人仿真軟件。
(2)能夠自主編制路徑規(guī)劃,識(shí)別抓取等程序。
5.2提交材料
(1)技術(shù)方案報(bào)告,評(píng)分要點(diǎn)如下:
序 號(hào) | 評(píng) 分 要 點(diǎn) |
1 | 零件識(shí)別與安裝的思路及操作過(guò)程 |
2 | 零件與安裝孔的圖像識(shí)別計(jì)算流程與結(jié)果 |
3 | 機(jī)器人控制流程與程序,軌跡規(guī)劃思路 |
4 | 安裝過(guò)程的可行性,創(chuàng)新性,合理性 |
5 | 文檔邏輯清晰,排版美觀 |
(2)答辯PPT,評(píng)分要點(diǎn)如下:
序 號(hào) | 評(píng) 分 要 點(diǎn) |
1 | 零件識(shí)別與安裝思路的講解 |
2 | 圖像處理算法講解 |
3 | 視覺(jué)驅(qū)動(dòng)機(jī)器人控制與軌跡規(guī)劃思路的講解 |
4 | 安裝過(guò)程的可行性,創(chuàng)新性,合理性 |
5 | PPT邏輯清晰,排版美觀 |
(3)仿真軟件視頻,評(píng)分要點(diǎn)如下:
序 號(hào) | 評(píng) 分 要 點(diǎn) |
1 | 機(jī)器人模擬運(yùn)動(dòng)仿真 |
2 | 運(yùn)動(dòng)仿真軟件與視覺(jué)軟件的信息交互 |
3 | 機(jī)器人運(yùn)動(dòng)仿真與圖像處理算法的講解 |
4 | 安裝過(guò)程的可行性,創(chuàng)新性,合理性 |
5 | 講解思路清晰,語(yǔ)言通順 |
六、初賽相關(guān)事宜說(shuō)明
1. 選手提交技術(shù)方案報(bào)告、PPT以及仿真演示視頻。技術(shù)方案報(bào)告、PPT與仿真演示視頻分值各占40%、20%、40%。
2. 組委會(huì)組織專(zhuān)家對(duì)參賽選手提交的技術(shù)方案報(bào)告與PPT進(jìn)行打分。
3. 參賽選手提交答辯PPT,時(shí)間要求5-8分鐘,初賽提交帶有講解旁白的MP4視頻文件。
4. 針對(duì)任務(wù),通過(guò)大賽提供的仿真軟件完成零件自動(dòng)識(shí)別與安裝任務(wù),并提交相關(guān)仿真視頻。
5. 對(duì)于仿真視頻,根據(jù)如下相關(guān)軟件進(jìn)行運(yùn)動(dòng)仿真與視覺(jué)算法處理,并制作視頻。視頻需要帶有計(jì)時(shí)器,要求不超過(guò)十分鐘。
序號(hào) | 軟件名稱(chēng) | 軟件版本 | 備 注 |
1 | VMware Workstation | V14.0以上 | 機(jī)器人仿真軟件環(huán)境 |
2 | AUBOPE | V4.5 | 機(jī)器人仿真軟件 |
3 | MVS | V3.0 | 實(shí)體相機(jī)設(shè)置軟件(選配) |
4 | Vision Master | V4.0 | 視覺(jué)算法平臺(tái) |
(1)通過(guò)AUBOPE仿真軟件,對(duì)任務(wù)進(jìn)行機(jī)器程序邏輯編寫(xiě) ,機(jī)器人運(yùn)行點(diǎn)位示教,機(jī)器人和視覺(jué)進(jìn)行通訊,獲取位置變量,機(jī)器人進(jìn)行任務(wù)動(dòng)作,軟件如圖4所示。
評(píng)分要點(diǎn):3D虛擬機(jī)械臂能模擬任務(wù)運(yùn)動(dòng)動(dòng)作,如識(shí)別過(guò)程、安裝過(guò)程等移動(dòng)動(dòng)作,可以顯示通訊獲取的視覺(jué)信息變量等,參賽選手通過(guò)對(duì)編寫(xiě)邏輯和內(nèi)容進(jìn)行講解并錄制視頻,根據(jù)步驟進(jìn)行評(píng)分。
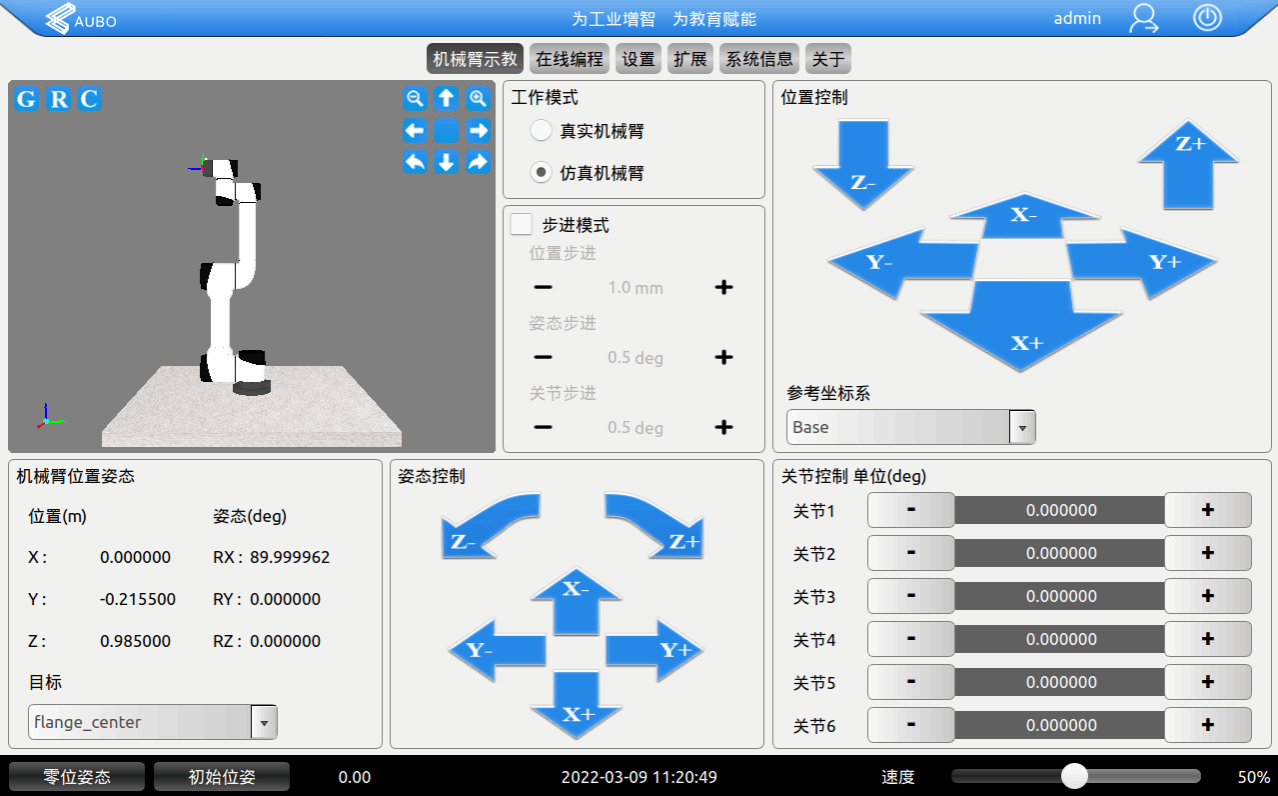
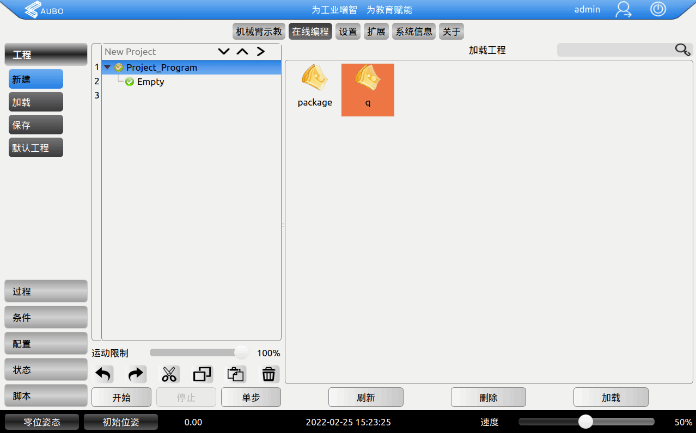
圖4 AUBOPE軟件界面
(2)通過(guò)Vision Master軟件,進(jìn)行視覺(jué)識(shí)別流程搭建,使用大賽官方提供的本地圖片,進(jìn)行手眼標(biāo)定的過(guò)程演示,標(biāo)志物、安裝孔以及零件的識(shí)別,位置信息的發(fā)送等過(guò)程。
評(píng)分要點(diǎn):能夠進(jìn)行功能演示,模塊參數(shù)具體介紹,分步驟給分。
七、參賽條件與方式
1.參賽條件:以小組的方式,每個(gè)參賽隊(duì)學(xué)生人數(shù)不得多于5人,指導(dǎo)教師不多于3人。參賽隊(duì)由所在學(xué)校統(tǒng)一向組委會(huì)報(bào)名。
2.參賽方式:參賽隊(duì)學(xué)生自接到大賽通知后,即可按大賽主題和內(nèi)容的要求進(jìn)行準(zhǔn)備,并聯(lián)系指導(dǎo)教師報(bào)名參賽。
注意:報(bào)名截止日期為2023年5月31日!請(qǐng)有意向同學(xué)務(wù)必在截止日期(含5月31日)之前先將報(bào)名表發(fā)送給聯(lián)系老師郵箱,審核通過(guò)后請(qǐng)?jiān)谛?chuàng)新創(chuàng)業(yè)平臺(tái)(https://cxcy.lnpu.edu.cn)完成報(bào)名和提交比賽材料。
八、競(jìng)賽承辦單位及聯(lián)系人
承辦單位:機(jī)械工程學(xué)院
聯(lián)系人:劉長(zhǎng)福
競(jìng)賽QQ群:197344269
郵箱:liuchangfu@163.com
附件1:2023年中國(guó)大學(xué)生機(jī)械工程創(chuàng)新創(chuàng)意大賽機(jī)械創(chuàng)意賽道報(bào)名表
附件2:2023年中國(guó)大學(xué)生機(jī)械工程創(chuàng)新創(chuàng)意大賽創(chuàng)意賽道校內(nèi)報(bào)名匯總表
創(chuàng)新創(chuàng)業(yè)學(xué)院
機(jī)械工程學(xué)院
2023年5月15號(hào)

